Прежде чем приступить к материалу, я Вас попрошу, если нравится то, что я делаю и хотите следить за моей деятельностью, то рекомендую подписаться на мой телеграмм канал: https://t.me/ypavla
Там я публикую новости о вышедших видео, статьях и разные устройства для умного дома и не только показываю.
Спасибо за внимание, теперь продолжим.
| Arduino | Raspberry pi |
| 0 Pin | 7 pin (GPIO4) |
| 1 Pin | 8 pin (GPIO14) |
Ну а теперь после того как Мы все подключили, давайте установим операционную систему наraspberry pi. Устанавливать будем rasbian. Как это сделать полно информации в интернете. Ну или можно посмотреть в конце статьи в видео.
А вот подготовку системы я распишу.
Сначала нужно обновить все репозитории и пакеты:
vncserver :1
(Но сервер VNC отключится после перезагрузки системы. Если хотите его включить в автозагрузку, то сделайте это как описано в этой статье: https://psenyukov.ru/%D1%83%D0%B4%D0%B0%D0%BB%D0%B5%D0%BD%D0%BD%D0%BE%D0%B5-%D1%83%D0%BF%D1%80%D0%B0%D0%B2%D0%BB%D0%B5%D0%BD%D0%B8%D0%B5-raspberry-pi-%D0%BF%D0%BE-vnc/)
Ну собственно после запуска сервера, он будет доступен по порту 5901.
Теперь на своем компьютере запускаем vnc viewer и подключаемся к raspberry pi введя ip адрес:5901 и введя учетные данные от raspberry pi.
Ну собственно теперь что касается python скрипта. Его можно скачать от сюда: https://disk.yandex.ru/d/uklKeupsiJZYaw
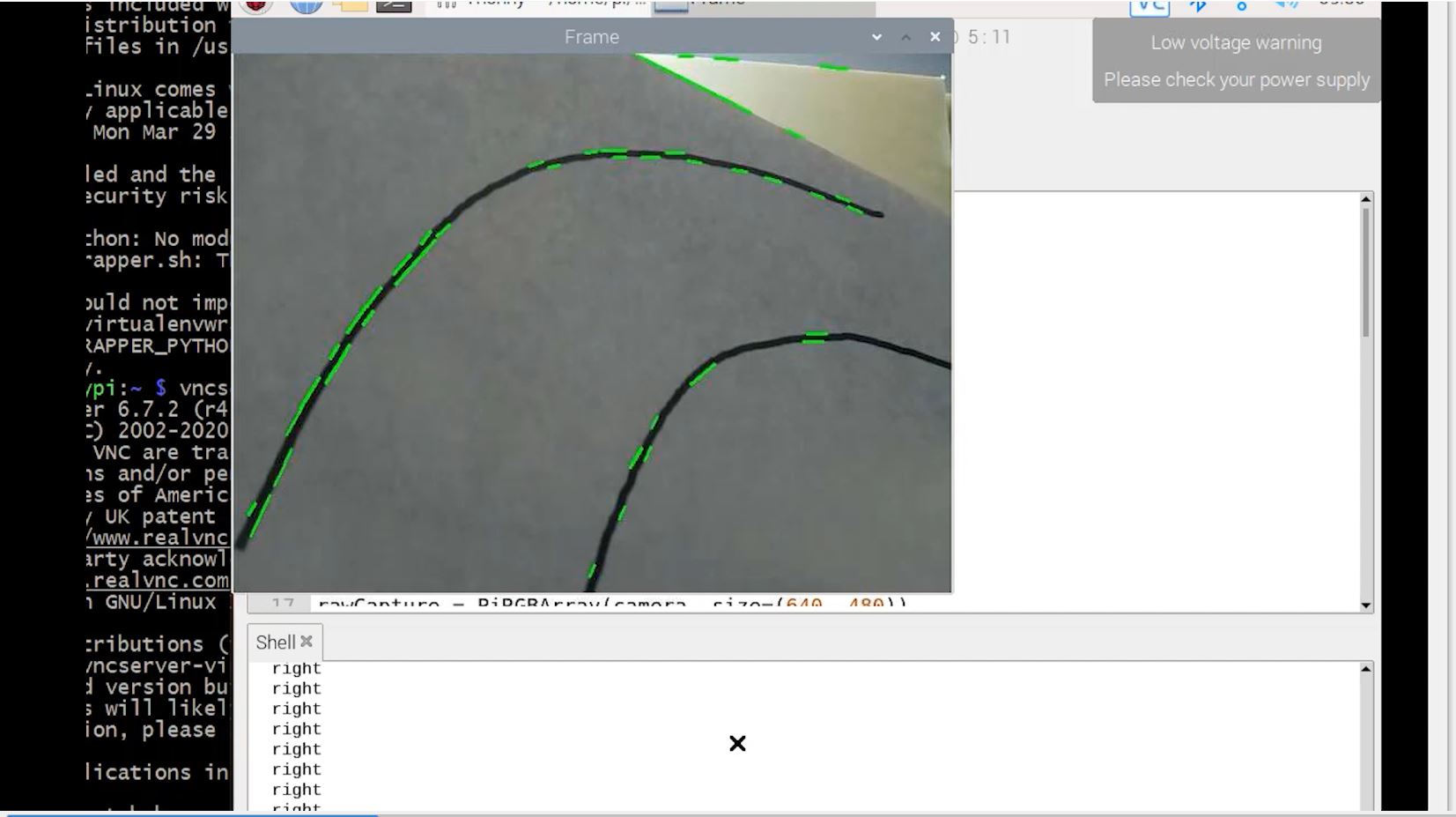
Открываем Thonny программу и вставляем скаченный код туда. Убедитесь что у Вас все вставилось корректно и все отступы на тех же местах где и должны быть.
Ну и после этого нажимаем кнопку RUN. После чего у нас запустится камера и программа начнет определять все черные линии. Попутно писать в монитор порта действие которое пытается предпринять увидев линию, а именно поворот: Right, Left, Straight.

Теперь давайте приступим к arduino. Скачаем скетч: https://disk.yandex.ru/d/CYLJaNxC-A37rQ
Отключим во время прошивки от пинов 0 и 1 arduino raspberry pi. И после того как все прошьется. Поключим обратно все так как описал выше. И теперь вместе с надписями: Right, Left, Straigh у нас будут выполняться те же действия поворотами сервопривода:

На этом все. Надеюсь Вам понравилось.
Все действия продемонстрированы в видео: