
Набор можно найти тут: http://alii.pub/5w88cr
Прежде чем приступить к материалу, я Вас попрошу, если нравится то, что я делаю и хотите следить за моей деятельностью, то рекомендую подписаться на мой телеграмм канал: https://t.me/ypavla
Там я публикую новости о вышедших видео, статьях и разные устройства для умного дома и не только показываю.
Спасибо за внимание, теперь продолжим.
Для данного конструктора есть инструкция и много примеров для работы. Перейти по ссылке чтоб ознакомиться: https://wiki.keyestudio.com/Ks0198_keyestudio_4DOF_Robot_Mechanical_Arm_Kit_for_Arduino_DIY
Мне же в тех примерах не понравилось, то что у данного конструктора управление сделано на джойстиках. Это очень не удобно. Тяжело сделать точные движения.
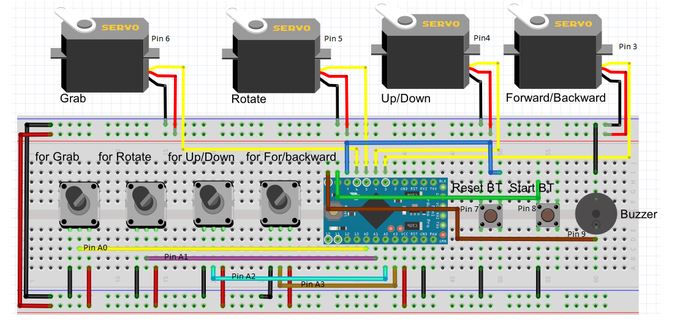
Я решил переделать управление на потенциометры. Взял 4 потенциометра на 10 кОм. Каждый потенциометр отвечает за свою серву.
Схема подключения получилась следующая:
Программа еще умеет запоминать движения. Точнее положение сервоприводов в момент в момент нажатия кнопки.
В общем левая кнопка запоминает положение руки. А правая кнопка потом воспроизводит.
Программу можно скачать вот отсюда: https://disk.yandex.ru/d/eDyrMgohlpxarA
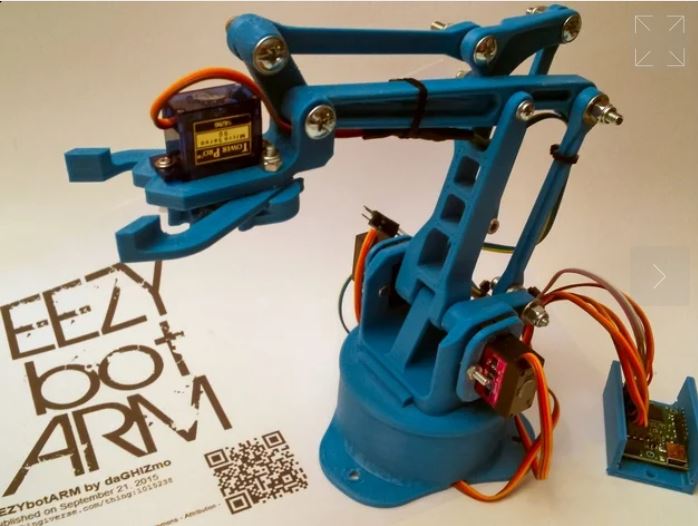
Так же хочу сказать, что данная рука является копией opensourse проекта eezybotarm. Для него существуют файлы для 3д печати. Их можно найти тут: https://www.thingiverse.com/thing:1454048
Ну а выглядит распечатанная рука вот так:
Ну и сборка и небольшое объяснение работы как и демонстрация. Это все можно посмотреть в видео ниже: